Background
During 2017 the prototype of the autonomous ferry Milliampere has been built and launched by researchers at NTNU. The 6 meter long prototype is a precursor of a twice as large ferry intended for passenger transport over the canal between Ravnkloa and Brattøra. The ferry will use a variety of sensors to perceive its surroundings and avoid collisions with other vessels. The primary sensor for this task will be a Velodyne lidar.
Target tracking is a central component of the ferry’s sensor system. Based on the raw sensor data, software must detect other objects, and estimate their locations and velocities. Many different tracking methods exist, and which method is most appropriate depends on the sensors used. The primary sensor for collision avoidance will be an automotive lidar, while cameras and radars also will be considered. Lidar and radar are both active sensors, which can measure both range and bearing. A key difference between radar and lidar is that the lidar has much higher resolution.
Traditional tracking methods have largely been motivated by military radar applications. A key assumption of these methods is that an object yields maximally one detection in each sensor scan. For lidar, this assumption is rather dubious. The lidar returns a point clould, where several points will come from a given object such as a ship. Furthermore, the ferry will operate in a confined environment, where it will have to maneuver very close to other vessels. It is therefore important to estimate the extents of other vessels, in addition to their kinematic states. This is known as Extended Object Tracking (EOT).
This is a fairly recent and exciting research field. Research on EOT needs to answer several important and difficult questions:
- How should target extent be parameterized?
- How does one figure out which measurements comes from the object, and which measurements are noise? (This is known as data association).
- How does one deal with situations where only parts of the object is visible?
- How should maneuvers of an extended object be modeled?
This autumn project will build upon a previous autumn project and master thesis to develop a reliable EOT method for the autonomous ferry. The focus will be on tracking of boats of a certain size such as the Munkholmen ferry.
 |
 |
|
|---|---|---|
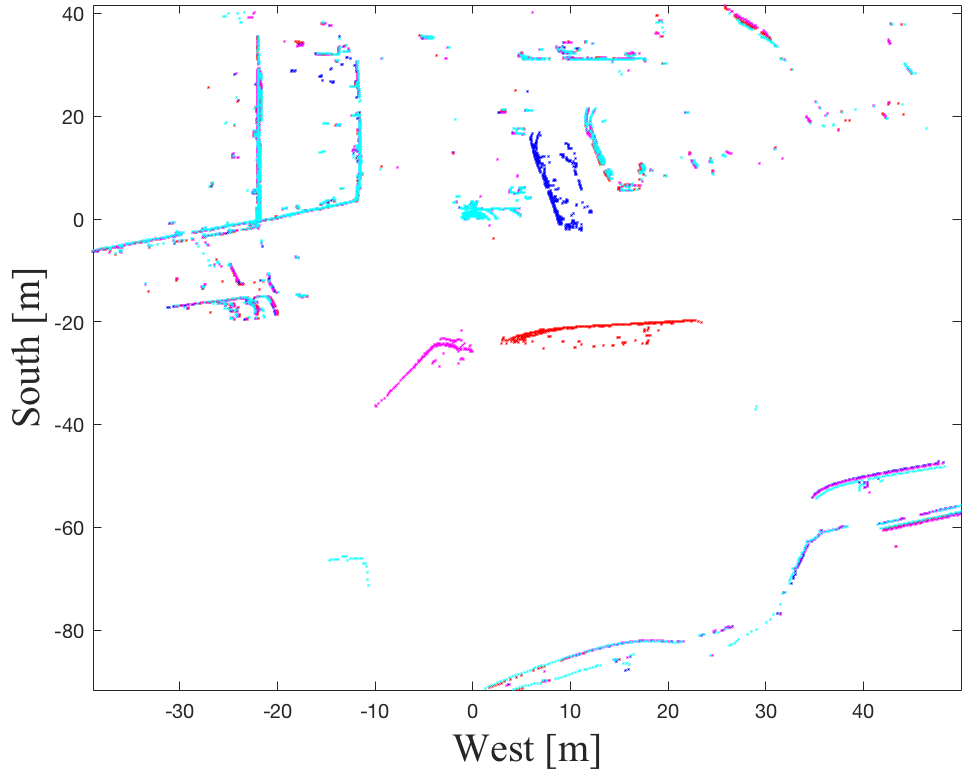
| The Munkholmen tourist ferry as seen by a lidar (different colors are data from different time steps). | The experimental setup where the lidar were recorded. It is evident that the boats in the background will cover several degrees in the field of view. |
Proposed Tasks
Several variations of this MSc thesis is possible.
- Investigate optimal algorithms for EOT in lidar data by means of direct measurement models and particle filtering.
- Further development of the EOT algorithm developed by Ruud et al. (See reference below.)
- Adaptation of existing PMBM-based EOT algorithms to maritime lidar data.
- EOT is actually related to the much more well-studied problem of simultaneous localization and mapping (SLAM). The object in EOT can be viewed as a map which the observer moves relative to. An amibitous but very interesting project could be to bring tools from state of the art SLAM methods into the field of EOT (e.g., factor graphs).
If time permits, there will be opportunities to conduct data recording experiments with Milliampere, and possibly even to test the methods in collision avoidance experiments.
Prerequisites
This is a list of recommended prerequisites for this master project.
- Strong programming skills in either Matlab, Python or C++. You should have written several programs in the size of 1000’s of code lines.
- Significant exposure to statistics and algorithms, ideally through additional courses from IMF/IDI or foreign universities such as ETH or UCSB.
- Experience with sensor fusion or radar systems from internships or voluntary activities.
Contact
For more information, contact main supervisor Edmund F. Brekke.
References
- Ruud, K., Brekke, E., & Eidsvik, J. (2018): “LIDAR Extended Object Tracking of a Maritime Vessel Using an Ellipsoidal Contour Model”, SDF 2018.
- Granström, K., Reuter, S., Meissner, D. & Scheel, A. (2014): “A multiple model PHD approach to tracking of cars under an assumed rectangular shape”, FUSION 2014.
- Granström, K., Baum, M. & Reuter, S. (2016): “Extended Object Tracking: Introduction, Overview and Applications”, Journal of Advances in Information Fusion.
- Schuster, M. & Reuter, J. (2015): “Target tracking in marine environment using automotive radar and laser range sensor”, MMAR 2015.
See also some of the media coverage that the autonomous ferry project has received: