 |
| Still image recorded from the sensor station at Brattøra. |
Background
Researchers at NTNU are in collaboration with Zeabuz AS developing an autonomous pedestrian ferry whose purpose is to cross the Trondheim City Canal. Having a good understanding of the traffic patterns in the canal will make it easier for the ferry to interact smoothly with other boats in the canal. It is therefore a goal to be able to conduct realistic simulations of all kinds of traffic scenarios that are likely to find place in the canal.
To achieve this, it is necessary both to register what happens in the canal, to comprehend what happens in the canal, and to generate and simulate scenarios based on this. This problem involves both sensor fusion, statistical data analysis, automatic control and behaviour modeling. Consequently, this project builds upon several threads in research and MSc projects at ITK.
- A Unity-based simulator for the autonomous ferry prototype MilliAmpere was developed as part of the EiT village Autoferge during Spring 2018. This simulator is currently being further developed by the MSc student Kjetil Vasstein at ITK.
- Three previous MSc students, Simen Hexeberg, Bjørnar Dalsnes and David Wu, have developed methods for long-term prediction of vessel trajectories. These methods analyze patterns in historical data from the Automatic Identification System (AIS), and attempts to guess the motion of a ship by comparing its current position and velocity with these patterns.
- Two MSc students at ITK, Jesper Pedersen and Rolf Klæboe, have worked on automatic harbor surveillance for this purpose. To support these projects a sensor station with a radar and a camera has been mounted on the Brattøra side of the canal.
- The Autosea project have developed several collision avoidance methods for autonomous surface vessels. Such techniques will necessarily have to be part of a realistic digital twin of the harbor environment.
 |
| Simulation of MilliAmpere using the Unity-based simulator. |
Scope
The overall goal of this project is to build comprehension of traffic and other activities in the harbour environment where milliAmpere is intended to operate. A key objective is to provide meaningful representations, content and statistics from recorded sensor data, that can be used in simulations. The project is intended for a single student, but can also be solved as a collaboration of two or more students.
Proposed Tasks for the 5th year project
The main goal of the specialization project is to make sure that we have a sufficient amount of data from the City Canal, and that we are able to use sensor fusion algorithms to extract meaningful and useful information from the data. This will build directly on previous master thesis projects on canal surveillance. The student is encouraged to participate in recording of data during the summer (when the canal is at its busiest) in collaboration with other final year students and PhD candidates working on situational awareness for the autonomous ferry. The following tasks will most likely be central in the specialization project:
- Literature study: What are available techniques for estimating behaviour models for maritime traffic?
- Data consolidation: Are the data sufficient to get a good comprehension of activities and traffic in the canal? Are additional data from the sensor station opposite Ravnkloa necessary? Are data from additional sensors needed?
- Run detection and tracking methods on available camera and radar data. Several possible methods for detection and tracking are available. Assess performance.
- Train a long-term prediction method with the results from the tracking system.
- Validate the long-term prediction method with results from the tracking system.
- Write report.
Proposed Tasks for the master thesis
- Make an assessment of additional information that can be extracted from the data. Such information can be vessel types, humans, road vehricles, weather information, etc.
- Include vessel types (kayak, motorboat, tourist ferry, etc.) as part of the prediction scheme.
- Include shore constraints and traffic rules (also known as the “COLREGS”) as part of the prediction scheme.
- Perform simulations based on the prediction method. Evaluate how realistic the simulations appear. To which extent should the predictions be data driven, and to which extent should they use models of motion control systems?
Collaboration
This is a project that is particularly suitable for collaboration with several other masters- and PhD-level projects. In particular, the last task suggested for the master thesis can naturally be done in collaboration with Simulation-based evaluation of autonomous guidance systems with collision avoidance functionality. The data recording and sensor fusion parts of the project can be done in collaboration with Joint tracking and localization. A couple of other proposals for specialization/master projects also cover long-term vessel prediction. These include Topics on obstacle intent inference and motion model parameter estimation and COLREG-compliant path following and collision avoidance with moving obstacles in the Trondheim fjord.
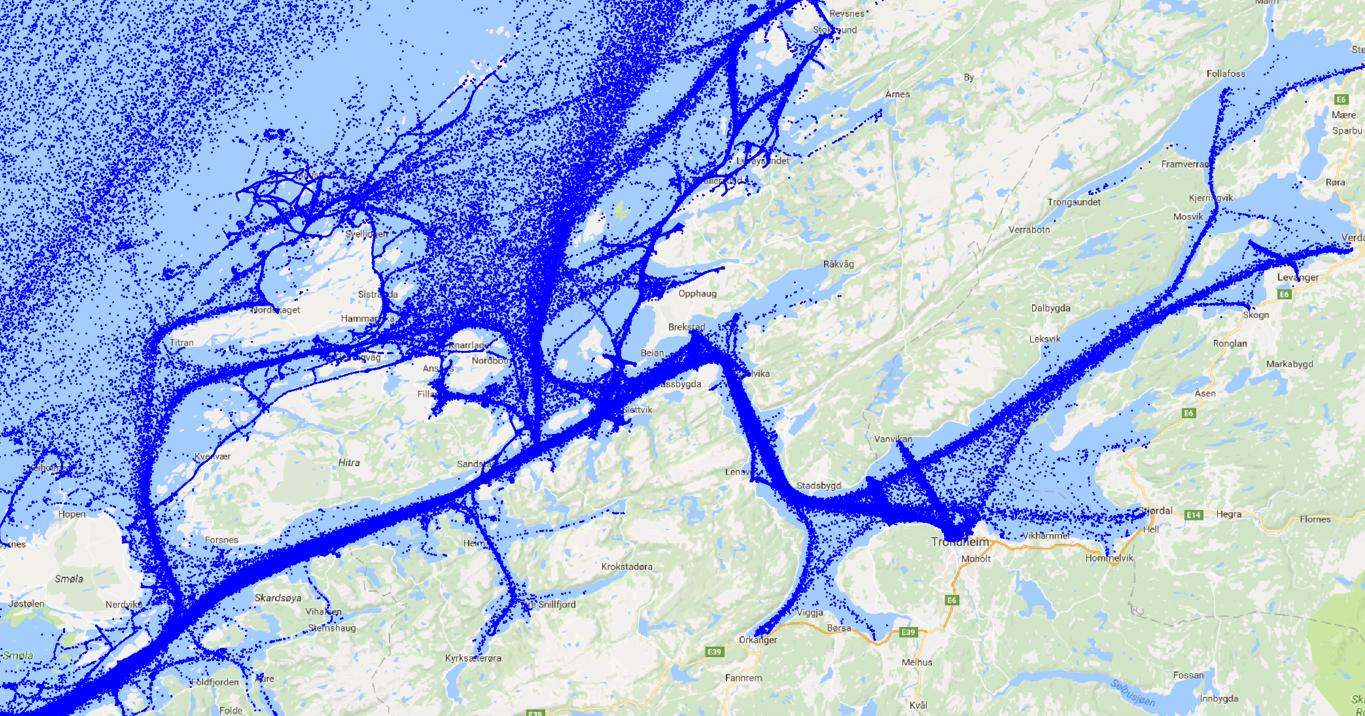 |
| Historical AIS data show many patterns for how ships tend to move. Can we establish similar patterns for a harbour area by means of radar and camera based tracking? |
References
- Ahmad et al. (2016). “Bayesian Intent Prediction in Object Tracking Using Bridging Distributions.” IEEE Transactions on Cybernetics , vol. 48, no. 1.
- Hexeberg, S. (2017). “AIS-based Vessel Trajectory Prediction for ASV Collision Avoidance.” MSc thesis, NTNU.
- Dalsnes, B. (2018). “Long-term Vessel Prediction Using AIS Data.” MSc thesis, NTNU.
- Meyer , E., Robinson, H., Rasheed, A. and San, O. (2019). “Taming an autonomous surface vehicle for path following and collision avoidance using deep reinforcement learning.” Preprint submitted to Elsevier.
- Brekke et al (2019). “The Autosea project: Developing closed-loop target tracking and collision avoidance systems.” Proceedings of ICMASS 2019, Trondheim, Norway.
Contact
Supervisors: Edmund Brekke, Adil Rasheed, Emil Thyri and Egil Eide.